
数字孪生虚拟仿真软件,智能制造数字孪生虚拟仿真软件
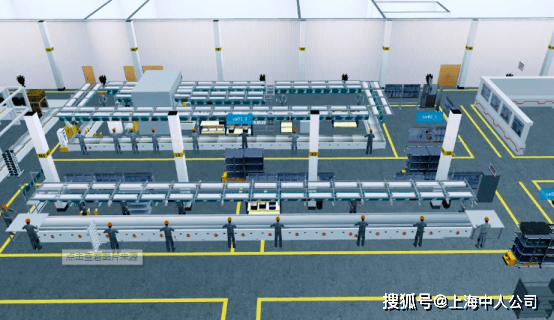
图片仅供参考
一、系统界面
• 具备隐匿式菜单和工具条:软件界面可对菜单、功能等图标进行隐藏,便于审 视全局视角,软件主界面用于显示场景和虚拟设备;
• 软件界面具备模型搜索功能,可通过输⼊关键字快速搜索所需数模,通过点击 模型来导⼊场景中;
• 模型/方案收藏功能,支持一键收藏用户在软件中规划的方案场景,支持单个 模型、单站、产线级场景的一键收藏,便于用户对方案的完善和修改;
• 软件系统具备四种视角功能,除去常规的三视图视角,此外还具备透视视角;
• 软件系统具备场景树功能,虚拟场景中产线构成的所有模块,可在场景数中按 照模块展开进行分类, 同时可以一键生成Boom 清单并导出,BOM 清单内容包括 但不限于设备名称、设备型号、设备数量、设备编码等信息;
• 软件系统界面包含案例库模块,至少包含光伏、3C、电机、锂电、汽车等四大 场景的成熟案例应用;
二 、场景支持及渲染
• 支持 200+设备大场景同时加载运行,支持大产线级别应用,包容更大场景; • 机理模型外形尺寸与现实等比例一致,外观高度还原现实场景,包括颗粒感, ⾦属感等物理属性感观呈现;
• 支持高清渲染管线,实现场景 AAA 级画面渲染;
三、模型库
• 模型库中的总数模量不少于 5000 种,可参数化模型不少于 1000 种,按照不同 的功能可分为 9 大类,包含机器人、供料装置、移料装置、工艺装置、辅助装置、 基础几何体等;
展开全文
• 模型都具备聚焦功能,示教可返回并锁定到目标模型处;
• 具备仿真人模型模块,仿真人可完成操作、行走、坐下、搬运以及站立等 5 种 演示指令;
• 机器人模型选型时,可呈现基本的负载和可达范围等信息参数,便于用户选择 合适的模型种类;
• 所有模型库中的模型都经过轻量化处理,输出文件大小可达 10M;
四、模型编辑功能
• 软件具备捕捉示教功能,机器人可在软件内对目标单位进行特征点的捕捉,并 自动示教出相应的位姿状态,帮助机器人更精准的完成工艺动作需求;
• 含机理模型导入功能,支持 GLB\STEP\FBX\PLY 等 7 种格式的模型导入;
• 含模型轻量化处理功能,支持大场景系统运行;
• 含机理模型模块化配置功能:支持对导入的机理模型进行机理配置;
• 含模型专有库管理功能,可分级进行模型管理、配置共享且模型库支持云端部
署;
• 可参数化的模型,可通过手动输入或滑动阈值范围的方式来对尺寸,类型,方 向等参数进行模型适配。
• 可参数化功能,不仅支持模型长宽高的变化,也可支持模型结构形式的变化;
五、模型导入
• 用户可通过模型编辑器自行导⼊模型并编辑,实现模型的仿真建模。支持
FBX,STP,STEP,GLB,GLTF,OBJ,STL 等七种常规格式;
• 用户可自行对模型进行仿真运动建模处理。模型在模型编辑器会显示模型的原 本的子节点。用户可定义运动关节,对各节点进行碰撞盒,坐标系、运动方式的 配置定义 ,以支持模型的运动;
• 导出模型及配置:导出模型可直接在 FSM 软件内进行使用,并通过 OPCUA 等通 信协议进行节点绑定后,通过外部控制器进行控制;
六、软件示教模块
• 可连接外部真实/虚拟示教器对软件场景中的机器人模型进行示教;
• 搭配的实体示教器可一示教器配多机器人,在一个示教器上进行示教;
• 所有机器人模型都可进行拖动和点动示教,同时,可在软件种进行示教速度的
调整,同时可记录 HOME 点;
• 软件内所有六轴机器人、SCARA 以及模组机器人全部可在场景中对机器⼈的关 节和笛卡尔进行点动与拖动示教;
• 机器⼈点位的位置和姿态,以及各运动关节的关节值可实时在软件相应面板上进行观测;
• 支持多品牌机器人,包含四大家机器人进行虚拟/实机示教,同时也具备对协作类六轴机器人进行示教;
•可在PC端使用,也可在移动端使用,本软件即可手动设置故障也能自动设置故障,本软件通过电路图中绿色的框选择手动设置故障点(最多可以设置39个故障点),也可以通过系统自动进行随机1个故障点设置,随机两个故障点设置,随机三个故障点设置,随机四个故障点设置,随机五个故障点设置,本软件内有工具箱,元件库,放大镜,电路图等功能,可通过工具箱可选择万用表进行检测,通过元件库选择合适的元件,通过放大镜可以清楚的了解各个元器件及电路。本软件通过电动机星三角启动控制电路故障的设置,并经过种种排查,让学生了解电动机星三角启动控制电路的工作原理及电路结构。





评论